目前,大多数中国的矿井提升机(70多个)采用传统的交流电梯控制系统。西门子plc网络通信是一种包括继电器逻辑电路、大型空气接触器和速度计发生器的接触控制系统。经过多年的发展,西门子plcs7系列电子控制系统已经形成了自己的特点,但其缺点也很明显。它的电路太复杂了。该系统具有中间继电器、电气接点和电气连接。这使提升机停止了由电气故障引起的事故。

采用西门子plc技术的新型电子控制系统已成功应用于矿山推广,并积累了良好的运行经验,克服了传统电子控制系统的缺点,代表了交换矿山的发展趋势,并推动电子控制技术的发展。基于plc技术的矿井升降电气控制系统电路结构的一般设计如图1所示。
它由以下五个部分组成:高压主电路(包括高压交换器、电动机、起动柜、动态制动)电源,主控制西门子plc电路,升降行程检测和显示电路,升降速度检测,并增加电压信号电路,高压主电路部分仍采用传统的继电器控制电路。。
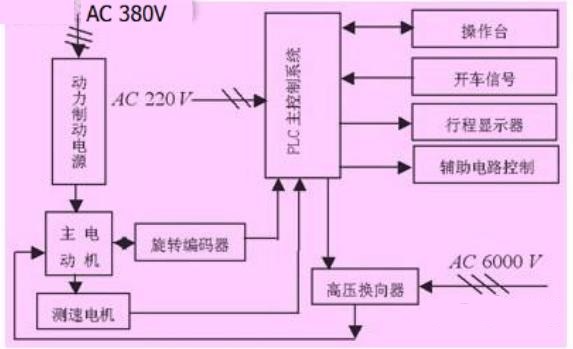
图1矿井交流起重电气控制系统框图
工作过程:当井口或井底通过信号通信电路发出驱动信号时,驱动条件可用。驾驶员将制动杆向前推离开关闭位置,主电机被释放。驱动器将主控制器的操作手柄推到前进(或后退)极限位置。主plc控制高压换向器首先接收电力以将高压信号发送到主电动机的定子绕组和主电动机。激活转子电阻,然后依次移除8段电阻,实现自动加速,最后运行自然机械特性。当AC提升机运行时,旋转编码器跟随主电机旋转并输出2列a / b相脉冲,它们分别连接到高速计数器hsc0的a / b相脉冲输入端。西门子plc基于a / b。通过加和减hsc0自动确定脉冲的相位关系。根据hsc0的计数值,可以计算并显示提升行程。同时,西门子plc根据旋转编码器的a相脉冲输出计数。可以基于恒定间隔时间期间hsc1的计数值来计算提升速度。
1硬件设计
1.1提升机主回路部分的设计主回路用于为提升电机供电,实现电压损失和过流保护,并控制电机的转向和调节速度。主电路包括高压开关设备,高压换向器的常开触点,动态制动接触器的常开主触头,动态制动电源单元,提升电机,电机转子电阻和恒定触点加速接触器磁头(1jc~8jc)由一个指示电流表和一个安装在驾驶员控制台上的电压表组成。系统原理图如图2所示。
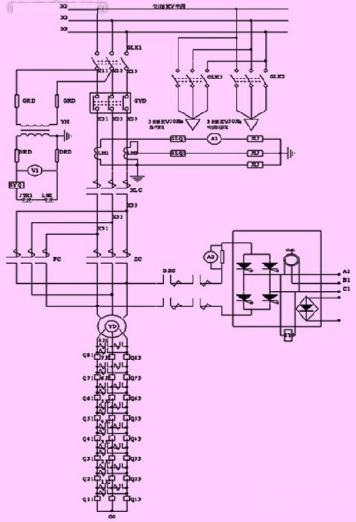
图2升降主回路系统原理图
主要牵引电动机选择:虽然笼式异步电动机结构简单,价格低廉,易于维护,但难以满足举升机的起动和调速性能要求。因此,轴升式交流传动系统采用绕组异步。线性异步电动机的转子串口电阻作为主拖动电机,可以限制起动电流,增加起动扭矩,并能在一定范围内调节转速。第二台6kv电源从地面变电站输送,一路工作,一路备份,隔离开关glk1通过tg-6高压开关柜,油开关陀螺,高压换向线接触器xlc主接点,正(或反向)接触器zc(或fc)到主电机的定子。高压开关柜内还设置了电压互感器、电压损耗服务线圈系统、电流互感器及过流行线圈等,用于电压损耗或过电流保护。在syq线圈电路中,紧急停止开关jtk1和换房间锁开关lsk也是串联的。
1.2大多数矿井提升机使用绕组异步电动机驱动制动电路设计,在大多数情况下,使用步进开关转子电路电阻实现速度调整。其制动系统采用晶闸管动态制动和可调制动系统。前者为电动制动,后者为机械制动。当提升机在减速段运行时,当速度在0到5℃之间时,电动制动和可调节制动不起作用;当速度在5至10之间时,电动制动限制并保持最大制动功率,同时调整制动动作,总制动功率矩增大;当超速为10时,超速继电器gsj1作用在安全电路上,可调节的制动器将制动鼓。
晶闸管电源单元由两部分组成,一部分是主电路,另一部分是触发电路。采用kzg三相晶闸管动态制动系统。系统为单闭环动态制动系统。系统图如图3所示。从图中可以看出,速度偏差控制和踏板控制是“或”关系。哪些信号被允许,哪些信号被允许通过,即相应的控制方法是有效的。因此,在实现单闭环控制时,驾驶员可以控制脚刹车,而在踏板控制过程中,如电梯超速,闭环系统可以监控监测功能。
图3单闭环动态制动系统框图
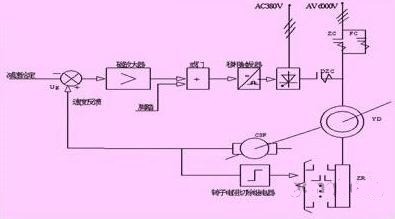
图3单闭环动态制动系统框图
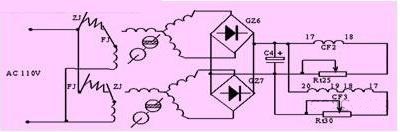
图4 速度参考电路
以自动调制为给定装置时,将励磁绕组连接到单相110v交流电,以三相同步绕组中的两相输出作为给定电压的输出。输出电压为交流电压如果需要直流,应通过桥式整流器输出。3.4动力柜内装有动态制动电路的晶闸管整流装置及其触发装置。功率制动供电装置的输出电压与触发装置输入的控制信号电平有关。
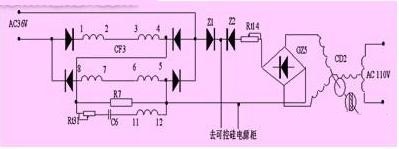
图5动态制动电压形成电路
控制信号电压由两个形成回路或门组成,如图5所示。只要其中一个满足触发要求,就可以使用触发晶闸管作为制动器。两个回路,一个是实际速度和给定速度形成的速度偏差值,自动控制CF3磁放大器的输出和动态制动输出,另一个由司机控制自动调节器CD2的输出进行手动调节。当手动控制动力制动系统时,驾驶员控制踏板以驱动调心机CD2的控制电压。应进行调整以匹配磁放大器CF3的输出。当鞋跟刚踩下,脚趾还没有掉下来时,相当于控制开关,使DZC电气连接,晶闸管动态制动输入,但此时,输出自动对中机CD2很小,动态制动电流最小。踩在驾驶员脚趾上时,自动对中机CD2的输出最大。
在踏板动力制动和CF3输出电路中,两个二极管Z1和Z2分别构成门电路。两个控制信号并联,互不影响。
1.4行程检测和显示旋转编码器用于将电梯的运行位置转换成脉冲。西门子plc对脉冲进行高速计数,通过相应的计算,自动生成电梯位置的相关数据,并传送到存储单元。西门子plc内部高速计数器。为了提高计数器的脉冲精度,采用日本欧姆龙公司的E6C CWSC型可逆旋转编码器。脉冲精度高,低速时不丢失。为了便于启闭机驱动器的操作,启闭机控制系统需要配备一个可靠的行程显示装置(也称为深度指示器),以显示启闭机容器在井筒中的位置。本文根据编码器测得的距离(0-570m),采用三个LED七段显示屏显示葫芦的位置。
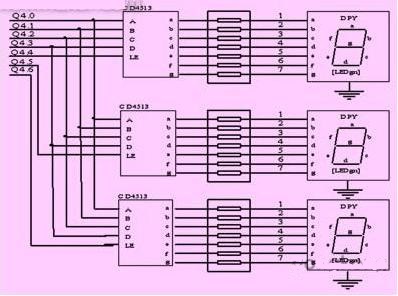
图6 西门子plc数字显示电路
在图6所示的电路中,具有锁存、译码和驱动功能的芯片CD4513驱动一个公共阴极LED七段显示,而三个CD45-13数据输入端A至D共用四个输出端可编程控制器,其中A为最低位置,D为最高位置。le是一个锁存启用的输入。数据输入的BCD输入数被锁定在信号上升沿的片上寄存器中,数字被解码并显示。如果输入不是十进制数字,则显示将熄灭。当le高时,显示的数字不受数据输入信号的影响。显然,n台工业触摸屏占用的输出点是4+n.
1.5辅助电路设计辅助电路,用于辅助设备的供电和控制。辅助电路的电源电压为380V AC,两回路供电。辅助电路的负载包括晶闸管动力制动电源装置、制动油泵电机、润滑油泵电机等
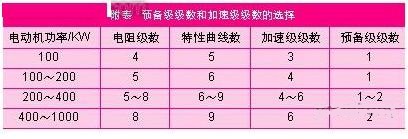
2、主电机转子电阻的计算对提升装置的正常运行起着重要作用。
在计算起动电阻时,首先确定起动电阻的级数和加速级数。由于所选系列直接影响最大开关转矩的增大或减小、平均起动加速度的增大或减小,甚至由于过载能力不足而使电机容量增大,因此应综合考虑经济合理的水平。号码。一般来说,准备水平和加速水平的选择如进度表所示。
三相平衡起动电阻的计算方法很多,但基本上可分为两种:一种是根据给定的加速度计算起动电阻,另一种是充分利用过载能力。电机。由于第一种方法简单、准确,本文采用这种方法。
3、西门子plc控制系统设计
3.1主控西门子plc网络通讯设计根据矿井提升机的运行方式和煤矿企业的实际特点,西门子plc在国内矿井提升机机电控制系统中也得到了迅速发展。然而,从现场使用的角度来看,目前在国内煤矿提升机控制系统中,西门子plc主要用于处理开关量,以取代原有提升机控制系统中的许多继电器、接触器、复杂接线和信号显示系统。涉及提升机安全运行的制动系统中的模拟和自动调节过程主要采用可调开关的通用电子模式(如半导体器件、运算放大器和晶闸管动态制动器)。
电子元件在使用过程中经常发生零漂和损坏,存在维护和重新调试困难、可靠性差等缺点,降低了电气控制系统的可靠性。针对上述问题,研究煤矿井下提升机的控制系统是十分必要的。本文采用西门子CPU 226主机和两个I/O扩展模块EM223和EM222设计了主控单元可编程控制器(PLC)。设计包括40个输入点和40个输出点,具体的I/O接线如下。图7显示。
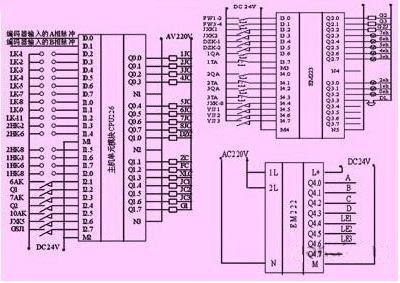
图7主电路和扩展的i/o接线
3.2 西门子plc控制软件设计的主程序流程图如图8所示。
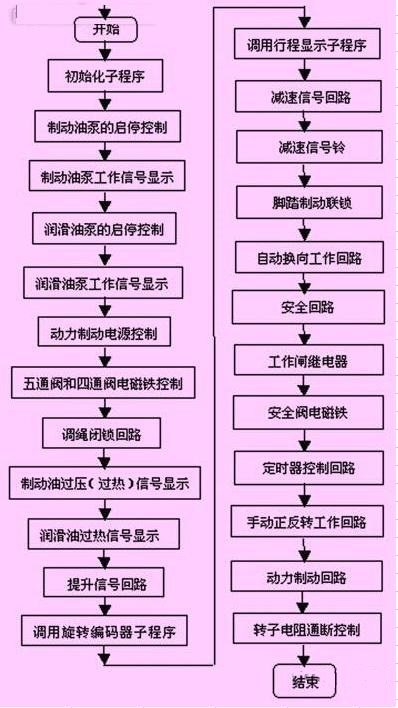
图8 主程序控制流程图
图8主程序控制流程图
1、在高速计数器hsc0和hsc1上初始化子程序用于执行以下操作:编写控制字,定义操作模式,清除,编写设置,设置计时器中断,中断连接,并开始计算。
2、制动油泵、润滑油泵、动态制动电源、五阀电磁铁、四阀电磁铁和安全阀电磁铁控制,是交流起重机安全运行所需的辅助设备的控制。
3、显示控制制动油过压信号、制动油过热信号和润滑油过压信号,用于控制交流起重机运行状态。
4、绳索调整过程中用于安全防护的绳索锁环。当双滚轮升降改为水平调节绳时,绳子转换开关1hk-3断开,使绳子的连杆插入安全环。正常操作时,lhk-3打开,绳索联锁不起作用。
5、采用增压信号回路,使交流升压电机启动或减速。
6、接近开关子程序用于监测提升机在矿井中的位置。
7、激光监测位置根据旋转编码器中的脉冲数显示当前冲程位置。
8、减速信号回路和减速信号时钟用于减速控制,并发出响铃报警信号。
9、自动反转工作电路和手动反转工作电路分别用于自动和手动模式下的交流起重电机的正负控制。
10、安全线路用于预防和避免交流电葫芦事故。
11、当交流增压电机启动或减速时,采用定时器控制回路和转子电阻/关闭控制控制控制转子电阻开关。
12、动态制动电路用于动态制动电源的输入和切断控制。
13、用于交流式升降电动机制动控制的踏板制动联锁和工作制动继电器。结论起重机控制系统结合plc控制和tkd-a控制系统具有可靠性、安全性和方便性。
总结: 采用西门子plc网络通信实现提升机的主控制逻辑,控制性能增加,提高自动化生产效率。关键是要充分发挥西门子plc的优势,运用其综合测量控制系统,解决限速保护等问题,与原有系统实现良好的配合,提高系统的综合性能,并实现投入低、输出效率高的特点。从系统应用的角度来看,还有一些问题需要进一步改进,如:网络通信功能和先进的控制技术和智能控制策略。在现有plc技术的基础上进一步扩大功能,将进一步促进中国的矿山升级,以及电气控制系统的现代化水平。














