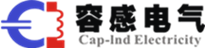
步进电机的控制系统由西门子plc200smart编程软件、环行脉冲分配器和步进电机功率驱动器组成,控制系统中PLC用来产生控制脉冲;通过PLC编程输出一定数量的方波脉冲,控制步进电机的转角进而控制伺服机构的进给量;同时通过编程控制脉冲频率——既伺服机构的进给速度;环行脉冲分配器将plc控制系统输出的控制脉冲按步进电机的通电顺序分配到相应的绕组。
plc控制系统的步进电机可以采用软件环行分配器,也可以采用如图1所示的硬件环行分配器。采用软环占用的PLC资源较多,特别是步进电机绕组相数M>4时,对于大型生产线应该予以充分考虑。采用硬件环行分配器,虽然硬件结构稍微复杂些,但可以节省占用PLC的I/O口点数,目前市场有多种专用芯片可以选用。
步进电机功率驱动器将PLC输出的控制脉冲放大到几十~上百伏特、几安~十几安的驱动能力。一般PLC的输出接口具有一定的驱动能力,而通常的晶体管直流输出接口的负载能力仅为十几~几十伏特、几十~几百毫安。但对于功率步进电机则要求几十~上百伏特、几安~十几安的驱动能力,因此应该采用驱动器对输出脉冲进行放大
一、西门子plc200smart编程软件是如何控制步进电机的?
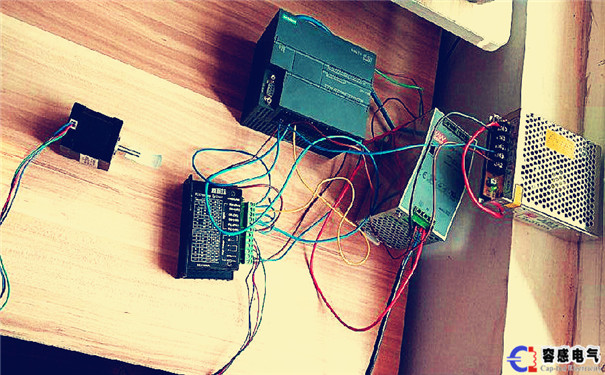
西门子plc编程软件与步进电机驱动模块的连接:驱动模块中CP+、CP-接PLC的脉冲信号,DIR+、DIR_、CP+口均先接3k电阻,然后接24V电源。第一个驱动模块CP-接PLC的Q0.0,DIR-接PLC的Q0.2,EN-接PLC的Q0.4第二个驱动模块CP-接PLC的Q0.1,DIR-接PLC的Q0.3,EN-接PLC的Q0.0
1、PLC的输出电压为24V,因此在与驱动模块连接时,与3K电阻限流器连接。
2、由于PLC处于PTO模式,只有当输出电流大于140 mA时,才能获得正确的输出脉冲。因此,在输出端和接地端间接施加200欧/2W下拉电阻以产生电流。(实验室使用的电阻功率不足。当使用200欧姆电阻时,功率至少为24*24/200=2.88W,即3 W电阻)
3、当PLC与驱动模块连接时,当PLC的输出电平低时,驱动模块电平不能降低,因此200欧/2W下拉电阻分别与EN和DIR连接。
驱动模块和电机连接:
驱动模块的输出端分别与电机的四根导线连接。
与PLC相连的电机传感器:
传感器电源为24伏,信号线由240欧姆电阻(试验中并联两个470电阻)和24伏电源拉上。信号线连接到PLC I0.3和I0.4。
连接每个模块的电源和接地线。PLC的输入、输出M对应点接地,L+对应点接24V电源。
二、西门子plc200smart编程软件步进电机速度与正反转是如何编程的?
1、主程序首先向前转,然后在正转结束时中断。在中断中,连接辅助触点(m0.x)。当M.0X关闭时,程序中的REVERSE开始运行。没关系。
2、利用动力输出轴指令使Q0.0或Q0.1高速脉冲,另一点如Q0.2作为方向信号,可以控制正、负转向。速度越快,输出脉冲周期越快。如果你很快,请考虑慢速加速,否则它不会启动,如果方向变化也很快,它会慢慢减速,否则它会剧烈振动。而且它也会步调一致。


")


")








