西门子plc编程与伺服驱动器、脉冲控制的关系在控制系统中的应用是新一代工业控制器件,随着微处理器技术的发展,西门子plc得到了迅速发展,也在很多领域都有应用。下面小编就为您介绍下西门子plc编程控制系统应用以及应注意的问题,希望对您有帮助.
一、西门子plc编程控制器与伺服驱动器和负载转速
伺服驱动器Pm=xxPulse/r,西门子plc发出的频率f(puls/s),计算速度n(r/s),
1、当伺服电机直接连接到轴时,将电子齿轮比设置为分子,分母设置为N.
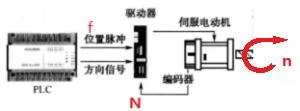
n=(f * N)/Pm ...........这个公式以r/s为单位查找脉冲数,1s内发送的脉冲数除以1中所需的脉冲数转=1s。
n:加载速度为: r/s。
f:来自控制器的频率为: pls/s。
Pm:伺服驱动器分辨率,:脉冲/r。
2、对于类型1,可以推断当负载轴配备有转盘或皮带轮时,可以计算皮带的线速度V.

V=R *(ω)=R *2πN
将1带入:
V=πd((f * N)/Pm)
n:加载速度为: r/s。
f:来自控制器的频率为: pls/s。
Pm:伺服驱动器分辨率,:脉冲/r。
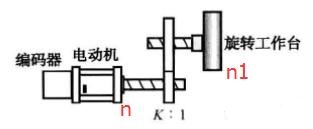
3、现场可能遇到输出扭矩不足,再加上减速机,将减速比设定为K.
根据等式1,电动机轴输出速度n是已知的,并且可以获得在减速齿轮之后输出的速度n1。
N1=N/K=(F * N)/(PM * K).................. R/S
N1=N/K=(F * N * 60)/(PM * K)...............转/分
假设n1轴带有滑块,我们还可以找到滑块移动的速度。
V=N1 * d=(F * N * d)/(PM * K)............毫米/秒
类似地,f=(V * Pm * K)/(N * D)
n:电机直接轴速度为: r/s。
N1:减速器后的速度输出,单位为: r/s。
K:减速机减速比。
V:滑块移动的速度,单位为mm/s。
D:导螺杆导程,单位:mm
二 、西门子plc编程控制器输出的脉冲与位移之间的关系
有了上面的一些内容,让我们再讨论一下:
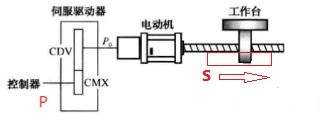
如下图所示,我们知道我们的伺服驱动器Pm=10000Pulse/r,导螺杆的导程(螺纹间距,可以理解为电机导线引出一个导程)到D,发出的脉冲数由西门子plc控制器为P,假设电子齿轮比为1。如何找到与工作台对应的距离S?
4,S=(D/Pm)* P ...首先找到一个脉冲的位移,乘以脉冲数来得到移动的距离。如果设定电子齿轮比N,则S=(D/Pm)* P * N ....因为P * N是伺服驱动器向电动机发送的实际脉冲。
D:导螺杆导程,单位:mm
P:控制器发送的脉冲数,单位:
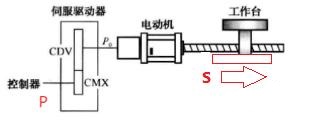
如果是以下系统,您如何计算移动的距离?系统的机械部分配备有减速齿轮比K.
5,S=(D /(Pm * K))* P * N ......同样的原因4找到一个脉冲的位移,由于增加了一个减速器,一个脉冲的位移被反射到负载轴小于4的顶部。可以看出,位移与齿轮结构成反比,例如系统减速器,并且与伺服驱动的电子齿轮比成比例。
根据上述公式,可以推断出相同的原因,如果它是盘结构,则脉冲数对应于盘旋转的角度。
上面提到的4,5“首先找到一个脉冲的位移”实际上是传说中的脉冲当量δ。
三 、浅谈脉冲当量δ
从图4中可以看出,(D/Pm)是无齿轮机的脉冲当量,D /(Pm * K)是使用齿轮箱时系统的脉冲当量。可以看出,如果确定了机械结构,则还确定该值,并确定对应于偏差的一个脉冲的位移,即,确定系统的精度。例如,5mm引线的导螺杆直接连接到十亿维伺服驱动器,精度为5/10000mm。
总结:以上就是小编根据西门子plc编程与伺服驱动器、脉冲控制的关系在控制系统中的应用及西门子plc控制系统应用需注意问题的一些见解,我们为客户提供量身定制的自动化解决方案,西门子plc,abb plc,欧姆龙plc,组态软件系列产品是专业的自动化控制系统集成服务商.欢迎来电咨询订购!

都有哪些VBS信息和编程工具?")












